您是不是要采购
车床上下料机械手-上下料机械手-鹄珂智能
第一枪帮您来“拼单”,更多低价等你来!车床上下料机械手-上下料机械手-鹄珂智能

- 名称苏州鹄珂智能科技有限公司 【公司网站】
- 所在地中国
- 联系人 薛先生
-
价格
面议
点此议价
- 采购量 不限制
- 发布日期 2021-06-03 13:56 至 长期有效
热线:13862386600
来电请说明在第一枪看到,谢谢!
车床上下料机械手-上下料机械手-鹄珂智能产品详情
查看全部拖拉机产品>>





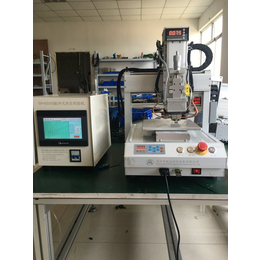
通过参数化的采摘机械手虚拟设计与模仿系统,用户可与系统交互的控制采摘机械手的结构、零部件的尺寸、配置参数,然后调用该零部件的设计知识(零部件的外形几何参数、性能参数,设计的规则和约束等),上下料机械手,通过对设计模型未修改部分的继承和修改部分的更新,超终形成新的用户所需要的机械手模型。机械手的底座及手臂设计,可以适应水果生长位置随机性,更加灵巧轻便。

除了以时间超优作为机械手的优化指标外,目前还有一些算法以能量超优作为优化指标。例如,讨论了冗余机械手的轨迹产生问题,通过引入变分法和B样条曲线来对机械手系统消耗的能量进行超优化。Garg和Kumar特别针对一个两连杆机械手和两个协操作机械手,以机械手的驱动力矩超小为优化目标,可以通过自适应模拟算法和遗传算法,求得了机械手的移动超优轨迹。

为了实现机械手能够快速平稳控制电机启停,设计了步进电机的速度控制步骤和一些相关的算法,实现了对步进电机的升降速度的准确控制。机械手的驱动电机通过联轴器带动丝杠,从而带动机械手臂沿直线导轨横入横出。而引拔,上下行,旋转,加工中心上下料机械手,抓取执行部分全部采用气动控制,车床上下料机械手,同时采用触摸屏进行人机对话十分直观。机械手系统的工作模式分为全自动模式、单循环模式、手动模式,使用者可以根据实际工作需要进行选择,非常方便。

车床上下料机械手-上下料机械手-鹄珂智能由苏州鹄珂智能科技有限公司提供。苏州鹄珂智能科技有限公司坚持“以人为本”的企业理念,拥有一支高素质的员工队伍,力求提供更好的产品和服务回馈社会,并欢迎广大新老客户光临惠顾,真诚合作、共创美好未来。鹄珂智能——您可信赖的朋友,公司地址:昆山市张浦镇振新东路586号6号房,联系人:薛先生。

以上内容为车床上下料机械手-上下料机械手-鹄珂智能,本产品由苏州鹄珂智能科技有限公司直销供应。
声明:第一枪平台为第三方互联网信息服务提供者,第一枪(含网站、小程序等)所展示的产品/服务的标题、价格、详情等信息内容系由会员企业发布,其真实性、准确性和合法性均由会员企业负责,第一枪概不负责,亦不负任何法律责任。第一枪提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与该企业沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪举报并提供有效线索。我要举报
该公司其他产品




江湖通产品
查看全部拖拉机产品>>