3d扫描仪-苏州文武三维科技有限公司-盱眙3d扫描仪
第一枪帮您来“拼单”,更多低价等你来!3d扫描仪-苏州文武三维科技有限公司-盱眙3d扫描仪
- 名称苏州文武三维科技有限公司 【公司网站】
- 所在地中国
- 联系人 钱慧斌
-
价格
面议
点此议价
- 采购量 不限制
- 发布日期 2020-04-28 14:46 至 长期有效
3d扫描仪-苏州文武三维科技有限公司-盱眙3d扫描仪产品详情
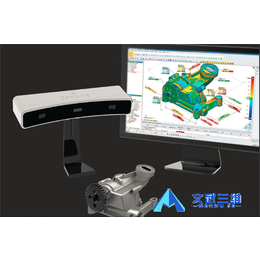
三维扫描仪的操作
后期处理工作(主要分两步,比较简单)
过程1:点云处理
现在市面上盛行的三维扫描仪均为点云主动拼接方法,无需后期手动拼接,即对物体外表扫描完结后,系统会自动生成物体的三维点云图形。但需求操作人员对扫描得到的点云数据去除噪点(即多余的点云)以及对其进行滑润处理。
过程2:数据变换
点云处理完后,要对数据进行变换,现在都是系统软件自动将点云数据直接变换成STL文件的。生成的STL数据能够与市面上通用的3D软件对接。 扫描结束。








点激光测量技术: 经过激光发射单点到物体外表,3d扫描仪手持,选用传感器在别的一侧观测,经过每一次的测量点反映物体的三维信息。其特点是精度较高,但测量速度慢,用于检查比较三坐标体系要快。
线激光扫描技术: 经过激光发射一条光线(称为光刀)到物体外表,选用传感器在别的一侧观测变形的光刀,经过解调光刀变形复原物体的三维信息。比较点激光扫描技术,其扫描速度大大的进步了,但也要附加运动体系得到完整的三维物面子形表明。该测量方法相同具有精度较高的特征,代表体系有三维激光扫描仪,手持式扫描仪等。
面扫描技术: 该类技术发展老练的主要是构造光扫描,选用发射体系发射面光(面激光或许条纹),选用传感器在其他一侧观测变形条纹,联系相位技能及计算机视觉技能解调变形条纹并复原物体的三维信息。该种技能近期得到*大的发展,能够敏捷的获取物体外表的面形信息,一起具有很高的测量精度,对测量环境低,应用于三维扫描具有很大的优势,代表体系有照相式三维扫描仪。

用三维扫描仪得到的数据需要处理
其他行业不多说*少三维扫描这个领域里,如今不管设备精度有多高,扫描得到的商品三维数据也会不可避免的引进数据误差,尤其是尖锐边和鸿沟邻近的测量数据,测量数据中的坏点,可能使该点及其周围的曲面片违背原曲面,所以,用三维扫描仪得到的数据,需要对原始点云数据应进行处理加工,一般要经过以下过程:
1.去除噪音点 常用的查看办法是将点云显现在图形终端上,或许生成曲线曲面,选用半交互半自动的光顺办法对点云数据进行查看调整;
2.数据插补 对于一些扫描不到的区域,其数据只能经过数据插补的办法来补齐,这里要思考两种曲面外型技能,根据点—样的曲面反求外型和根据点的曲面拟合技能;
3.数据滑润 数据滑润的目的是为了消除噪音点,得到准确的模型和良好的特征提取作用,盱眙3d扫描仪,选用滑润法处理办法,3d扫描仪,应力求保持待求参数所能提供的信息不变;
4.数据光顺 光顺泛指润滑、顺眼,但由于精度的请求,3d扫描仪器,不允许对测量的数据点施加过大的修改量来满意光顺的请求,另一方面由于实物鸿沟曲面的多样性,鸿沟上的某些特征点(鸿沟折拐点)必须予以保存,而不能被视为“坏点”;
5.点云的重*整合 在重新装夹后屡次扫描构成的数据要进行重*整合,现在一般的CAD软件还都没有此项功能,需要外型人员手艺“缝合”,在测量件上选择两次*状态下的基准点,在两次*测量的过程中,分别测量两次*状态下的基准点的坐标值,然后以一定的判别规矩判别出各基准点的测量精度,终究处理得到终究数据。
数据是死的,人是活的,只要活用数据,它们才有更大的用途,所以,处理数据看来也是一件功德。