agv牵引小车、agv、科罗玛特机器人科技(查看)
第一枪帮您来“拼单”,更多低价等你来!agv牵引小车、agv、科罗玛特机器人科技(查看)

- 名称科罗玛特机器人科技(苏州)有限公司 【公司网站】
- 所在地中国 江苏 苏州 吴中区
- 联系人 柏总
-
价格
面议
点此议价
- 采购量 不限制
- 发布日期 2018-06-10 12:40 至 长期有效
agv牵引小车、agv、科罗玛特机器人科技(查看)产品详情
科罗玛特机器人科技(苏州)有限公司,系科罗玛特自动化科技(苏州)有限公司的直属子公司,是一家专注于研发、生产及销售工业机器人、智能物流车(AGV)为主的高新科技企业。欢迎新老客户咨询!
惯性导航AGV便于监管员工
以往企业的一个车间里至少百来个人,agv小车磁导航,不少员工总是在监管人员不注意的情况下偷懒,而监管人员和设备是存在盲点和死角的,导致偷懒人员不仅存在侥幸心理并将这种侥幸心理蔓延到整个团队。使用AGV后,agv无人搬运车,员工大量减少员工的管理也变得方便许多。

科罗玛特机器人科技(苏州)有限公司,系科罗玛特自动化科技(苏州)有限公司的直属子公司,是一家专注于研发、生产及销售工业机器人、智能物流车(AGV)为主的高新科技企业。欢迎新老客户咨询!
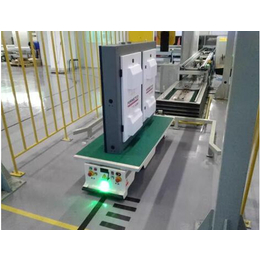
惯性导航AGV的特征
惯性导航AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作*、结构简单、可控性强、安全性好等优势。与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此在自动化物流系统中,****能充分地体现其自动性和柔性,agv牵引小车,实现高1效、经济、灵活的无人化生产。
科罗玛特机器人科技(苏州)有限公司,agv,系科罗玛特自动化科技(苏州)有限公司的直属子公司,是一家专注于研发、生产及销售工业机器人、智能物流车(AGV)为主的高新科技企业。欢迎新老客户咨询!
惯性导航AGV的原理。
惯性导航AGV属于一种推算导航方式。即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置。因而可连续测出运动体的当前位置。惯性导航系统中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。
agv牵引小车、agv、科罗玛特机器人科技(查看)由科罗玛特机器人科技(苏州)有限公司提供。agv牵引小车、agv、科罗玛特机器人科技(查看)是科罗玛特机器人科技(苏州)有限公司(www.cromatrobot*)今年全新升级推出的,以上图片仅供参考,请您拨打本页面或图片上的联系电话,索取联系人:余经理。