您是不是要采购
龙门机械手、苏州吴中特尔德机械、无锡机械手
第一枪帮您来“拼单”,更多低价等你来!龙门机械手、苏州吴中特尔德机械、无锡机械手
- 名称苏州吴中经济开发区特尔德机械厂 【公司网站】
- 所在地中国
- 联系人 张小勇
-
价格
面议
点此议价
- 采购量 不限制
- 发布日期 2017-12-21 07:35 至 长期有效
热线:18915691612
来电请说明在第一枪看到,谢谢!
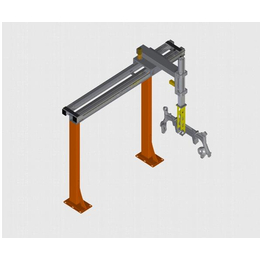
龙门机械手、苏州吴中特尔德机械、无锡机械手产品详情
查看全部其他干燥设备及配件产品>>
苏州特尔德机械厂主要经营坐标机械手、非标机械手定做、龙门机械手等,欢迎来电咨询!
机械手所用的驱动机构:
电气驱动式电力驱动是机械手使用得****多的一种驱动方式。其特点是电源方便,响应快,无锡机械手,驱动力较大(关节型的持重已达400kg),注塑机机械手,信号检测、传动、处理方便,并可采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机(AC)为主要的驱动方式。由于电机速度高,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。有些机械手已开始采用无减速机构的大转矩、低转速电机进行直接驱动(DD)这既可使机构简化,又可****控制精度。

苏州特尔德机械厂主要经营坐标机械手、非标机械手定做、龙门机械手等,欢迎来电咨询!
机械手臂的设计要求有哪些?
手臂动作要灵活
手臂的结构要紧凑小巧,才能做手臂运动轻快、灵活。在运动臂上加装滚动轴承或采用滚珠导轨也能使手臂运动轻快、平稳。此外,龙门机械手,对了悬臂式的机械手,还要考虑零件在手臂上布置,就是要计算手臂移动零件时的重量对回转、升降、支撑中心的偏重力矩。偏重力矩对手臂运动很不利,偏重力矩过大,会引起手臂的振动,非标机械手定做,在升降时还会发生一种沉头现象,还会影响运动的灵活性,严重时手臂与立柱会卡死。所以在设计手臂时要尽量使手臂*通过回转中心,或离回转中心要尽量接近,以减少偏力矩。对于双臂同时操作的机械手,则应使两臂的布置尽量对称于中心,以达到平衡。

龙门机械手、苏州吴中特尔德机械、无锡机械手由苏州吴中经济开发区特尔德机械厂提供。龙门机械手、苏州吴中特尔德机械、无锡机械手是苏州吴中经济开发区特尔德机械厂(www.szdexi.cn)今年全新升级推出的,以上图片仅供参考,请您拨打本页面或图片上的联系电话,索取新的信息,联系人:张小勇。

以上内容为龙门机械手、苏州吴中特尔德机械、无锡机械手,本产品由苏州吴中经济开发区特尔德机械厂直销供应。
声明:第一枪平台为第三方互联网信息服务提供者,第一枪(含网站、小程序等)所展示的产品/服务的标题、价格、详情等信息内容系由会员企业发布,其真实性、准确性和合法性均由会员企业负责,第一枪概不负责,亦不负任何法律责任。第一枪提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与该企业沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪举报并提供有效线索。我要举报
该公司其他产品





江湖通产品
查看全部其他干燥设备及配件产品>>





